Szemtelen bicikliseken és udvarias vezetőkön törik a fejüket a robotautók

A Volvo automatizált vezetésre képes S60-asa
Nézze meg a sporthíreket is
Nézze meg a sporthíreket is
Chris Urmson, a Google automatizált autókat fejlesztő részlegének vezetője április végén írt egy blogbejegyzést, amelyben elárulta, hogy az automatizált vezetésre képes autóik már 1,1 millió kilométert tettek meg emberi beavatkozás nélkül útkereszteződések nélküli főútvonalakon, így az elmúlt évben már a jóval bonyolultabb városi közlekedés kihívásaira összpontosíthattak. 2012 óta ez volt az első hivatalos bejelentés a Google részéről, amelyben a robotautók fejlesztéséről tájékoztatták a közvéleményt. Akkor Sergey Brin, a Google társalapítója azt jósolta, hogy öt éven belül meg lehet majd vásárolni az új technológiát, és ezt azóta sem cáfolták vagy módosították.

Urmson az áprilisi írásában elárulta, hogy a robotautó-flottájuk már több ezer olyan, tipikusan városi közlekedésre jellemző szituációt tud kezelni, amelyekkel egy évvel ezelőtt még nem tudott volna megbirkózni. A robotpilóta már képes például felismerni és értelmezni a közlekedési lámpák és táblák jelzéseit, ahelyett, hogy egy előre betáplált térképből következtetne ezekre, több száz tárgy között képes különbséget tenni, és az építési területeken is jóval megbízhatóbban jut keresztül, mint korábban. Azonban a Google is tudja, hogy a robotautó még messze van a tökéletességtől: a kocsinak jobban kell tudnia kezelni a kerékpárosokat, a gyalogosokat, a kereszteződéseket és a többi autóval való bonyolult interakciókat, és fejleszteni kell egyebek között a sávváltás képességét is. Kezdetben az emberi vezetőnek készen kell majd állnia az irányítás átvételére, ha a számítógép hibázna.
Jelenleg két tucat Lexus RX450h szabadidő-autóban teszteli a Google a saját robotpilótáját, az autókat utólag szerelték fel radarokkal, kamerákkal, ultrahangos érzékelőkkel és a tetőn pörgő, 360 fokos képet adó lézerszkennerrel. A rendszer valós idejű 3D-s képet alkot a környezetéről, amelyben az idegen objektumokat négy kategóriába (mozgó járművek, gyalogosok, kerékpárosok és álló tárgyak) sorolja. Kezdetben elég gyengék voltak a vezérlő szoftver képességei, egy utcasarkon várakozó csoportot például egyetlen gyalogosként érzékelt, ma azonban már képes különbséget tenni a csoportot alkotó egyének között.

Korábban a fejlesztők beprogramozták az autók vezérlőszoftverébe, hogy a kerékpárosok kézjelzéseit irányjelzésnek fogják fel. Aztán jött a felismerés, hogy a kerékpárosok nagy többsége nem használja kanyarodás előtt a kézjelzést, sőt, néha még arra is vetemednek, hogy szembejöjjenek a sávban. Courtney Hohne, a Google szóvivője elárulta, hogy ezt felismerve az utóbbi időben már a valós tapasztalatokra támaszkodtak a kerékpárosok kezelésével kapcsolatban.
Felhasználták több ezer, kerékpárosokkal történt találkozásnak a tapasztalatait, amelyeket a Google autói a 16 ezer, városban megtett kilométer alatt szereztek (Kaliforniában 2013-ban lépett életbe az a törvény, amely tesztelési célból engedélyezi az automatizált autók forgalomban való részvételét városokban is, a szabályozást azóta Nevada, Florida, Michigan és Washington állam is átvette). A Google legújabb, szabadalmakkal védett szoftvere már képes megjósolni, hogy nagy valószínűséggel merre mozog majd tovább a robotjármű közelébe került kerékpáros, de ha nem találja el, akkor is képes azonnal reagálni a helyzetre.
A Google autója már egy nyugodt kisvárosban is képes biztonságosan közlekedni
„Egy mérföld városi vezetés sokkal összetettebb feladatot jelent, mint egy mérföld az országúton, mivel több száz objektum mozog különböző szabályok szerint egy viszonylag kis területen” – írta Urmson a blogbejegyzésében. Korábban a Google azt tervezte, hogy a világ összes stoptábláját beprogramozza a térképébe, de most már ott tart a kamerás táblafelismerő technológia, hogy szinte bármilyen táblát felismer, még azokat is, amiket a gyerekeket átkísérő tanárok tartanak a kezükben az úton való átkeléskor. Természetesen a táblafelismerés a legjobb megoldás, de nem kell elvetni a beprogramozott táblák ötletét sem. Dr. Martin Winterkorn, a Volkswagen-konszern vezérigazgatója az április végi, Budapesten tartott előadásán elárulta, hogy mindössze 100 bekamerázott kamion már elég információt biztosít ahhoz, hogy a teljes németországi úthálózat tábláiról aktuális adatokkal rendelkezzenek.

A Google szerint nehéz annak a programozása, hogy mikor álljon meg az autó a városi közlekedésben, de talán még nehezebb az, hogy mikor induljon el újra. Gondoljunk csak egy lámpa nélküli, egyenrangú útkereszteződésre, ahol az elsőbbségadás szabályai érvényesek. A Google-autók jellemzően minden emberi sofőrt maguk elé engednek, akik keresztezhetik az útjukat, mert meglehetősen óvatosra programozták be őket, ez viszont a mögöttük jövőket idegesíti. Képzeljük el, mi történne, ha több ilyen udvarias robotpilóta találkozna egy egyenrangú kereszteződésben: valószínűleg hatalmas dugó alakulna ki. Természetesen ezeken kívül is rengeteg feladatot kell még megoldani a városi környezetben: értelmezni kell a vezetők kéz-, hang- és fényjelzéseit, a rendőrök jelzéseit, és az egyes országokban piros jelzés mellett is engedélyezett kis ívben történő jobbra kanyarodást is. Abban szinte minden szakértő egyetért, hogy az egyik legnagyobb kihívás a csapadékos időben való automatizált vezetés lesz, mivel ilyenkor a kamerák és a különböző szenzorok nem működnek megbízhatóan.
A kedvezőtlen időjárás problémájára a Volvo is gőzerővel keresi a megoldást. Nemrég befejeztek egy kutatást, amelyben azt vizsgálták, hogy az útburkolatba épített mágnesek mennyire tudnák segíteni az önjáró, automatizált vezetésre képes autók iránytartását. A Svéd Közlekedési Igazgatósággal közösen végzett projekt kulcsfontosságú az önmagukat vezető autók piaci bevezetése szempontjából, mivel pont az autóknak az úton való pontos és megbízható pozicionálása az egyik legnehezebb feladat ebben a témakörben. Az útba épített mágnesek azért tűnnek jobb megoldásnak a GPS-nél vagy a nagyfelbontású kameráknál, mert rossz időjárási körülmények között és fizikai akadályok mellett is problémamentesen tudnak működni.
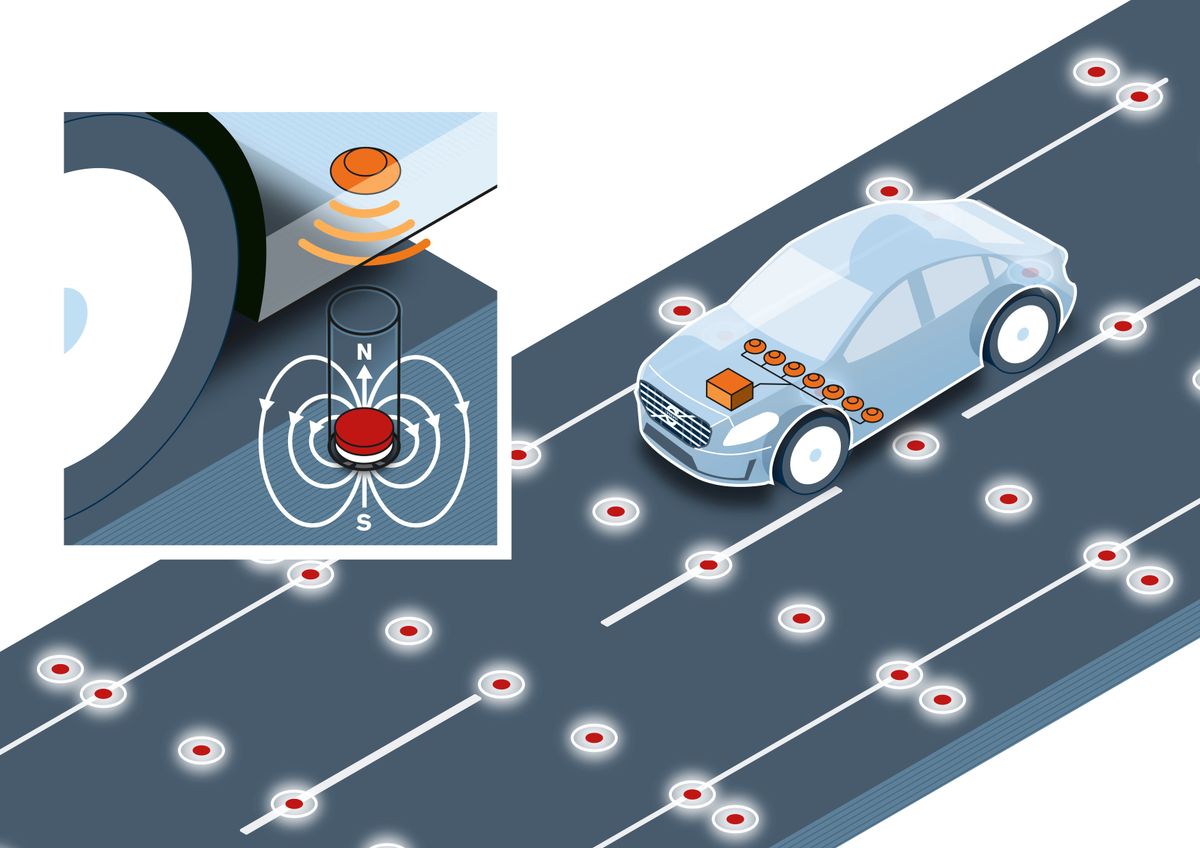
„A mágnesek egy láthatatlan sínt hoznak létre, ami szó szerint kikövezi az utat egy olyan pozicionálás felé, amely kevesebb, mint 10 centiméteres pontossággal tartja a megfelelő helyen az autót. Már többféle sebesség mellett teszteltük a rendszert, és az eredmények eddig nagyon ígéretesek” – nyilatkozta Jonas Ekmark, a Volvo Car Group megelőző biztonságot kutató részlegének vezetője. A mágnesek nemcsak az autónak az úton való elhelyezését segítik, de az útelhagyásos balesetek számának csökkenéséhez is hozzájárulhatnak, és akkor is jó szolgálatot tehetnek, ha az útburkolati jelek nehezen vagy egyáltalán nem láthatók. Az autók pontos pozicionálása arra is lehetőséget ad, hogy több, de keskenyebb sávot fessenek fel az utakra, ami az áteresztő képesség növekedését jelentené.
A Volvo a saját tesztpályáján egy százméteres szakaszba építette be 200 mm mélyre a kerek, 40 mm átmérőjű és 15 mm vastag mágneseket, és természetesen a tesztelésre használt autó is kapott mágnesérzékelő szenzorokat. „Eddigi tapasztalataink azt mutatják, hogy a vasmágnesek hatékony, megbízható, és elég olcsó megoldást jelentenek az infrastruktúra és a fedélzeti rendszerek szempontjából is. A következő lépés, hogy valós forgalomban is teszteljük a rendszert” – mondta Ekmark.
A Volvo hamarosan egy átfogó tesztet indít az automatizált vezetésre képes autókkal, 100 darab átalakított S60-as működését fogják vizsgálni Göteborg utcáin, a mindennapos vezetési körülmények között, ráadásul úgy, hogy a volán mögött mérnökök helyett potenciális ügyfelek foglalnak majd helyet. Az automatizált autók egy meghatározott, nagyjából 50 kilométeres útszakaszon fognak közlekedni, az út mindent tartalmaz majd a lakott területektől az autópályás szakaszokig, és a torlódások is gyakoriak rajta. „A tesztautók már képesek követni a sávot, a közlekedés ritmusához igazítani a sebességet, és önállóan be is tudnak csatlakozni a közlekedésbe. A végső célunk, hogy 2017-re olyan autókat tudjunk kínálni az ügyfeleinknek, amelyek képesek lesznek magukat megbízhatóan vezetni” – nyilatkozta Eric Coelingh, a Volvo technikai szakértője.
Az automatizált vezetés nem lesz kötelező, az autógyártók – helyesen – azt az elvet vallják, hogy a vezetőülésen ülő ember, ha akarja, bármikor visszavehesse az irányítást a jármű felett. Martin Winterkorn, a Volkswagen-konszern vezérigazgatója a budapesti előadásán elmondta, hogy az automatizált autók robotpilótája először a forgalmi dugókban fogja átvenni az irányítást az embertől, de csak legfeljebb 60 km/h sebességig, és csak olyan útszakaszon, ahol a szembejövő sávokat fizikailag elválasztották egymástól.
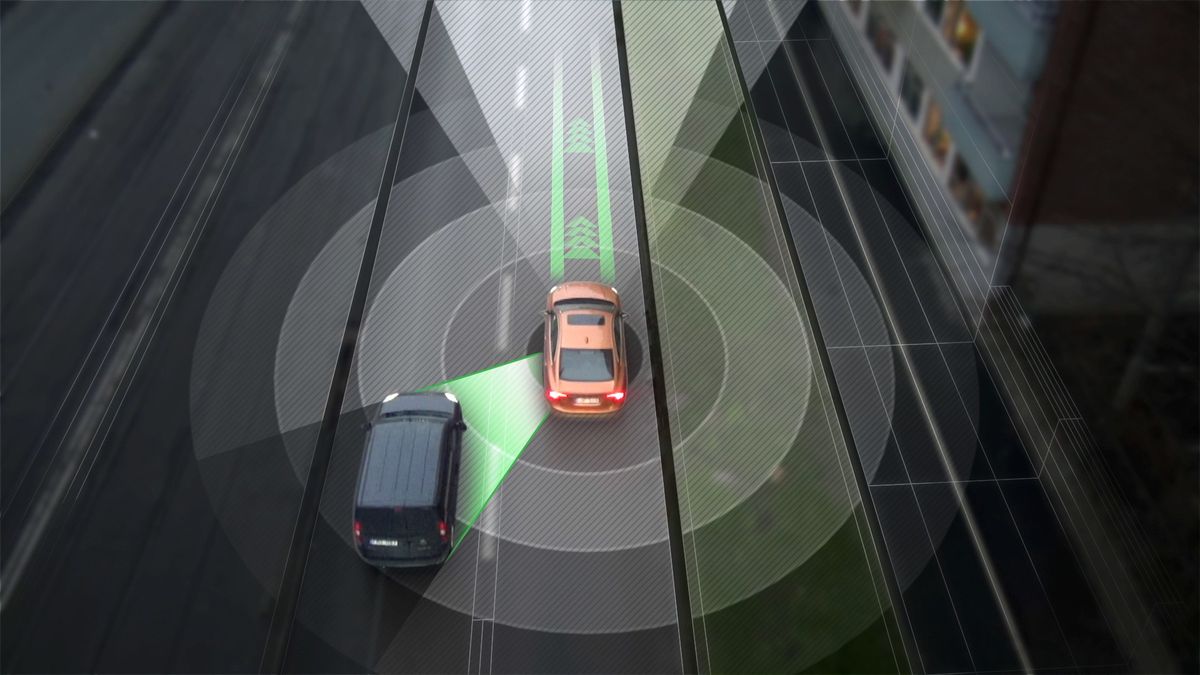
A gép irányítja majd a gázt, a féket, a váltót és a kormányt is. Folyamatosan elemzi majd az autó a környezet állapotát, a sávból ki- és bemozgó más autók mozgására is képes lesz reagálni. Ha a rendszer eléri a saját korlátait, ha véget ér a fogalmi dugó vagy a fizikailag kettéválasztott útszakasz, akkor a rendszer jelezni fog a vezetőnek, hogy vegye vissza az irányítást. Ha ezt nem teszi meg, akkor a figyelmeztető hangok és fények erősebbek lesznek, ha pedig erre sem reagál, akkor az autó leállítja magát az út szélén, és vészjelzésbe kezd.
Az első automatizált autók olyan szenzorokat, érzékelőket és kamerákat használnak majd, amelyek már a mai legkorszerűbb luxusautókban is megtalálhatók. Elöl és hátul ultrahangos érzékelőből lesz a legtöbb, de lesznek radarok (közepes hatótáv 90, nagy hatótáv 250 méterig), sztereo-szélvédőkamerák (az út felfestését és más járműveket, akadályokat, gyalogosokat érzékel), sőt, az Audi a legújabb automatizált tanulmányautójába (a Las Vegas-i CES-es bemutatott A7-esbe) egy lézerszkennert is beépített előre. A legpontosabb érzékelésre ez a műszer képes, a látótávolsága 80 méter, és 140 fokos szögben érzékeli a környezetet, négy különböző szinten. Legfontosabb előnye, hogy éjszaka is megbízhatóan működik, és a legapróbb akadályokat is észreveszi.

A közlekedési dugók mellett a parkolás lesz a másik olyan helyzet, amiben először lehet majd automatizált vezetésre képes autókat használni. Ez különösen akkor jöhet majd jól, ha a parkolóhely szű. Elég lesz kiszállni az autóból, és a kulcsot vagy az okostelefonos alkalmazást használva (5 méteres távolságon belül tartózkodva) parancsot adni a parkolásra. Folyamatos gombnyomással lehet majd az autót rábírni arra, hogy önállósítsa magát, tehát a távirányító tulajdonképpen csak engedélyadó, irányítani nem lehet vele. Az autó bezárja majd az ablakait, ajtóit, és leállítja a motorját, amikor elkészült – ezt jelzéssel tudatja majd a vezetővel. Természetesen az ilyen autók egyetlen gombnyomásra ki is állnak majd helyettünk.
Az automatizált vezetés központi vezérlőegysége az Audi legújabb, magát vezető tanulmányautójában ma már alig nagyobb, mint egy doboz bonbon, holott az első automatizált Audiban, egy 2008-ban épített TT-ben még az egész csomagtartót elfoglalta. A zFAS-nak hívott modul a rendszer agya, ez egyesíti és dolgozza fel az összes szenzorból érkező információkat, így ez már komplett képet alkot az autó környezetéről. Hatalmas előrelépés az adatok központosított kezelése a jelenlegi, egymástól szinte teljesen függetlenül működő vezetéstámogató rendszerekhez képest. Jól jellemzi az új zFAS modul erejét, hogy számítási kapacitása megegyezik egy mai középkategóriás autó összes vezérlő számítógépének kapacitásával. Manapság egy teljesen hétköznapi Volkswagen Golfban is 1,5 km kábelt használnak fel, 50 vezérlő modul dolgozik benne, amelyek számítási teljesítménye 20 asztali számítógépével ér fel. Kell is a teljesítmény, mert egy óra alatt 25 gigabájt adatot kell feldolgozni.
A Volkswagen-konszern az idei CeBIT-en mutatta be a James 2025 nevű vízióját, amely az automatizált vezetésre képes autók egy lehetséges műszerfalmegoldását vetíti előre. Amint a vezető aktiválja a robotpilótát, a kormánykerék összehajtogatja magát és a háttérbe húzódik, a műszerfalként működő, vezető előtti képernyő eltűnik, a pohártartók előbújnak, a vezetőülés hátrébb csúszik a sínen: a sofőr számára tehát egyértelmű, hogy mikortól nincs már szükség a beavatkozására. A robotpilóta bekapcsolásakor a középkonzol tetején előbukkan egy másik kijelző, amelynek a menürendszerében úgy is barangolhatunk, hogy a levegőben mozgatjuk a kezünket. A kormány csak akkor válik újra elérhetővé, ha a jármű a céljához közeledik, és a megérkezésig már csak 20 másodperc van hátra.
Bár a hardveres feltételek már nagyrészt adottak, a programozóknak sok problémát kell még megoldaniuk, hogy a robotautók hatékonyan, biztonságosan és kényelmesen vigyék el úti céljukhoz az utasokat. Ezzel párhuzamosan a jogi kérdéseket is meg kell majd oldani, ami legalább annyira nehéznek ígérkezik, mint a technikai rész. Az első automatizált vezetésre képes autóknál még biztosan a vezető lesz felelős az esetleges balesetekért, de egy évtized múlva már olyan autók is megjelenhetnek, amelyekben a vezetőnek nem kell állandóan készenlétben állnia az irányítás visszavételére, akkortól pedig már az autógyártóknak kell majd vállalniuk a következményeket.











