Íme a megoldás, hogyan lehetne eltakarítani az űrszemetet
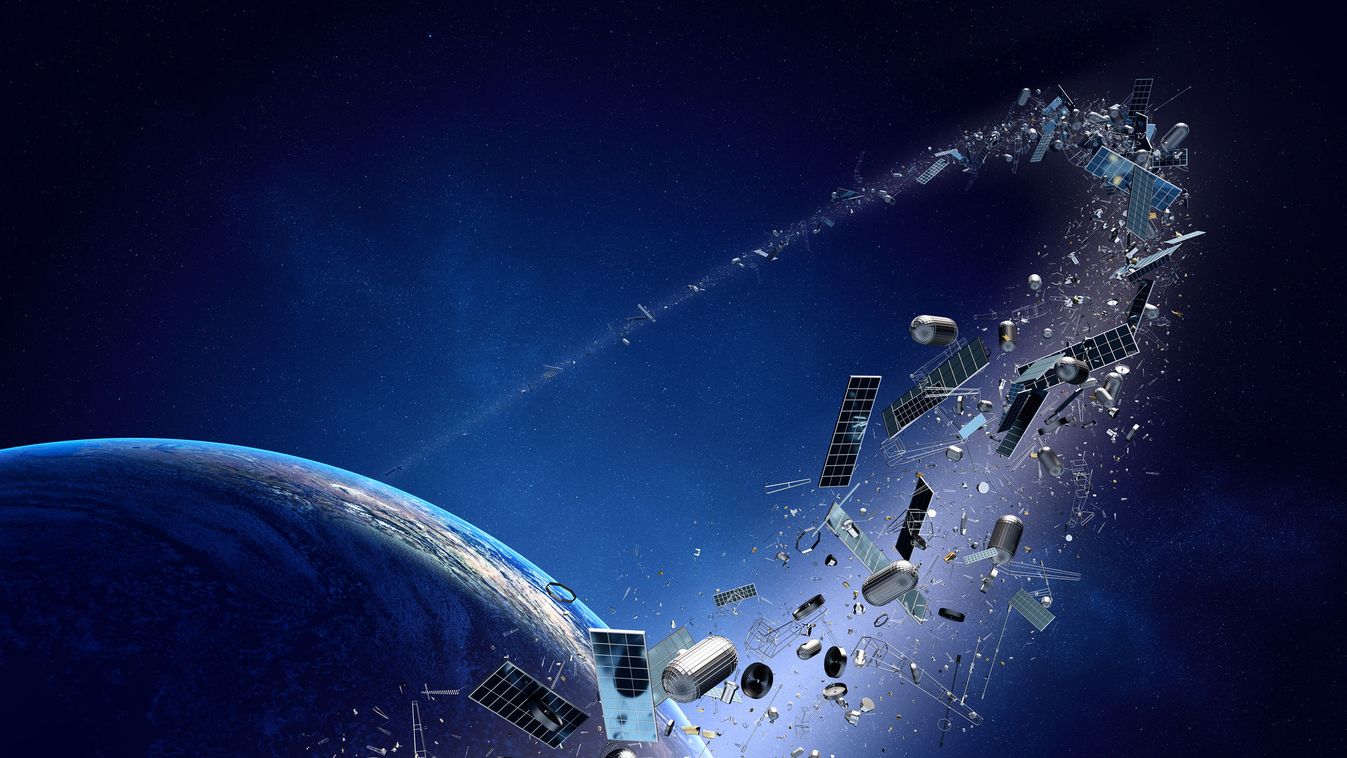
33985633 - space junk orbiting around earth - conceptual of pollution around our planet (texture map for 3d furnished by nasa - http://visibleearth.nasa.gov/)
Nézze meg a sporthíreket is
Nézze meg a sporthíreket is
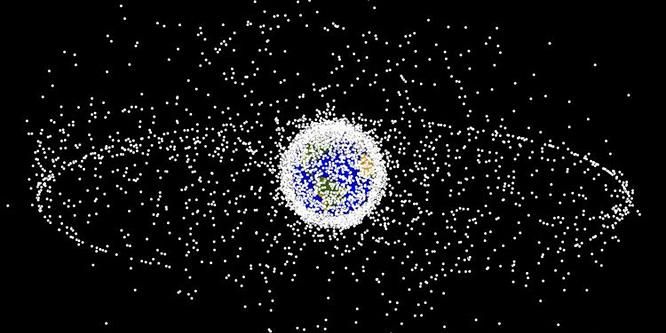
Amint ezeket a sorokat olvassa, bolygónk körül nagyjából
500 ezer, emberi berendezésekből származó törmelékdarab száguld az űrben,
némelyik több mint 28 000 kilométer per órás sebességgel. Könnyen elképzelhetjük – különösen ha láttuk a Gravitáció című filmet –, hogy az űrszemétdarabkák mekkora veszélyt jelentenek a műholdakra éppúgy, mint az űrjárművekre és személyzetükre.
Az űrszemét összetakarítása leginkább azért problémás, mert az űrben van. A szívókorongok nem működnek vákuumban. A közönséges körülmények között használatos ragadós anyagok, például a ragasztószalagok szintén nem jönnek szóba, mert az őket ragacsossá tevő vegyületek nem bírják ki az extrém hőmérsékleti ingadozásokat. A mágnesek meg eleve csak olyan tárgyakra hatnak, amik mágnesezhetők. A legtöbb eddig felvetett megoldás - mint amilyen a hulladékszigony - azért rizikós, mert erőteljes ütközést feltételez a berendezés és a szemét között, ami a szándékkal ellentétes módon új, megjósolhatatlan irányba lökheti el a hulladékdarabokat.

Hogy valamiképp mégis képesek legyünk megbirkózni az űrbéli rendetlenséggel, a Stanford Egyetem és a NASA Sugárhajtási Laboratóriuma (Jet Propulsion Lab, JPL) egy újfajta robottal állt elő, amely az említettektől különböző elven ragadná meg és távolítaná el a hulladékot. A fejlesztésről a Science Robotics című folyóiratban adtak hírt.
Az általuk kidolgozott fogószerkezet olyan tapadási elven működik, amit a gekkók tanulmányozása inspirált
– mondta Mark Cutkosky mérnökprofesszor, a cikk első szerzője. – A fejlesztés egy körülbelül tíz éve zajló munka leágazásaként indult. Az eredeti cél olyan mászórobotok létrehozása volt, amelyek úgy tapadnak a felülethez, ahogy a gekkók a falhoz."

A csoport a fogókészüléket, valamint annak kicsinyített változatát nemcsak a földi laboratóriumban, hanem különböző zéró gravitációs kísérleti terekben – egyebek között a Nemzetközi Űrállomáson – is próbára tette. A biztató eredmények nyomán a kutatók most már arra kíváncsiak, vajon
hogyan teljesít majd a berendezés az űrállomás védőburkán kívül.
„A fogószerkezetet egy sor űrmisszióban fel lehetne használni, az űrjárművek találkoztatásától és dokkolásától a Föld körüli pályán keringő hulladék begyűjtéséig – nyilatkozta Aaron Parness, a JPL extrém körülmények közötti robotikával foglalkozó csoportjának vezetője. – Később kifejleszthetnénk egy robotsegédet is, amely az űrjárművek burkolatán fel-alá mászkálva javításokat végezne, filmfelvételeket készítene, és felderítené a hibákat."
A Cutkosky-labor által kifejlesztett, gekkóelvű tapadóanyagokat korábban már felhasználták mászórobotokhoz, sőt egy olyan alkalmazásban is, amely emberek számára teszi lehetővé a különösen síkos felszíneken való felkapaszkodást. A gekkók azért képesek a sima falakra is felmászni, mert
talpaikon speciális mikroredők találhatók.
Ezek a felszínre tökéletesen rásimulva ún. Van der Waals-erőt hoznak létre, amely vonzást teremt a talpak és a fal között. A vonzóerő olyan, egyenként gyenge intermolekuláris kölcsönhatásokból ered, amelyek a molekulák külső elektronfelhőinek eltolódása nyomán ébrednek.
Az ember alkotta tapadóanyag kifinomultságban még mindig alulmarad a gekkóéval szemben – a tapadóredői körülbelül 40 mikrométer szélesek, míg a gekkó talpának redői ennél kétszázszor vékonyabbak, mintegy 200 nanométeresek –, de a működési elvük lényegileg azonos.
A mesterséges változat a gekkó talpához hasonlóan csak akkor tapad, ha a redők megfelelő irányban nyomódnak a felszínhez, de a kölcsönhatáshoz a jó irányban kifejtett csekély erő is elegendő.
Ez a tulajdonsága különösen alkalmassá teszi az űrszemét begyűjtésére.
„Ha nyomást igénylő ragasztóanyaggal próbálnék megragadni egy lebegő tárgyat, az egyszerűen elsodródna – magyarázza Elliot Hawkes, a Kaliforniai Egyetem munkatársa, a közlemény társszerzője. – A gekkótalpat azonban először nagyon finoman hozzáérintem a lebegő tárgyhoz, majd a talpat elfordítom, hogy a redők fogást találjanak, és máris a kedvem szerint tudom mozgatni az objektumot." Az elengedés hasonlóan finom mozdulattal történik, amely alig fejt ki erőt a tárgyra.
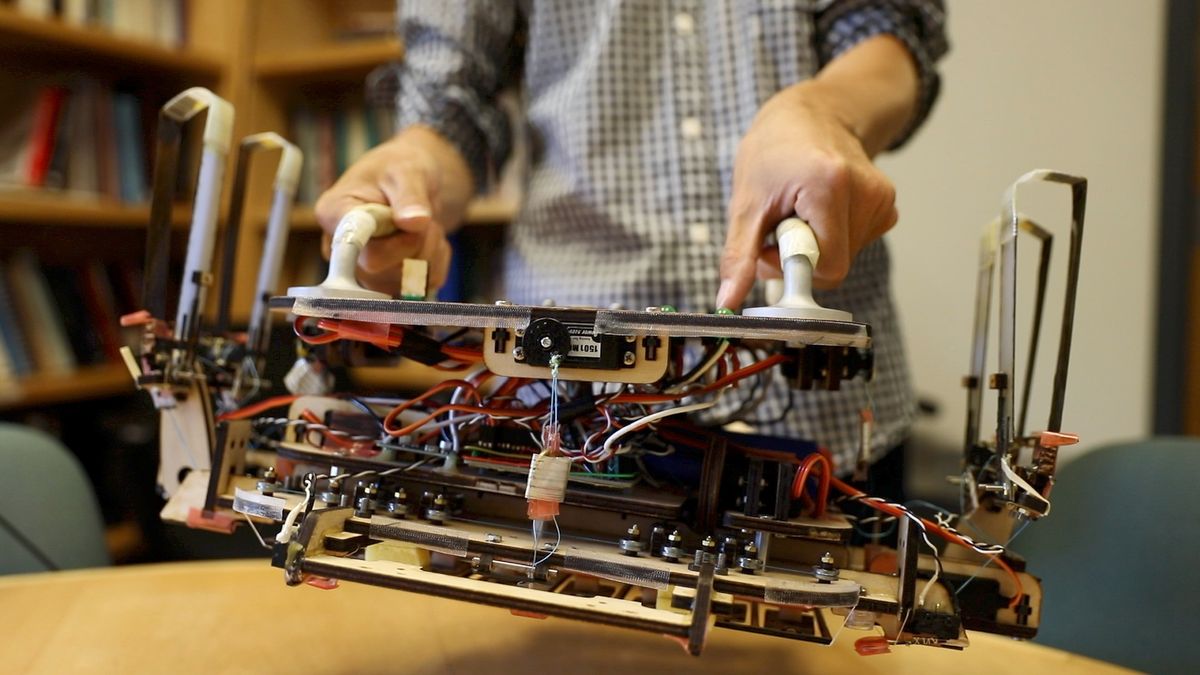
A tapadómezőket a fogórobot több felszínén helyezték el. A szerkezet az elülső felszínén négyzetes tapadótalpakból álló mintázatot visel, a robot karjain pedig, amelyek minden irányba kinyújthatók és az elülső felszín felé behajlíthatók, mintha csak ölelne velük, a tapadóanyag vékony csíkokban van elrendezve. Az elülső felszínre felvitt, négyzetes talpakból álló mintázat a lapos objektumok – mint például egy napelem – elfogására hivatott, míg a karok egy rakétatest vagy bármilyen más szabálytalan, görbe formájú tárgy megragadására alkalmasak.
A tervezéskor az egyik legnagyobb kihívást az jelentette, hogy
miként osszák el a fogóerőt egyenletesen az egész tapadási felszínen.
A mérnökök ezt úgy oldották meg, hogy az elülső felszín kis négyzetes talpait csigás erőátvivőkkel kötötték össze, amely egyben a fogótalpak és a befogandó tárgy közötti tapadást is szabályozzák. E nélkül az erőcsatolás nélkül a négyzetes fogótalpak nem viselkednének összehangoltan: egyenlőtlen terhelés esetén egyenként engednék el a céltárgyat, nem egyszerre. A terheléselosztás arra is alkalmassá teszi a fogórobotot, hogy hibás felszínű tárgyakkal is dolgozzon, amelyekkel nem mindegyik fogótalp tud kapcsolatot létesíteni.
A csoport arra is ügyelt, hogy a fogórobot rugalmas és merev üzemmódok között tudjon váltogatni. „Ha elképzeljük, hogy egy lebegő tárgyat akarunk befogni, az a legjobb, ha minél rugalmasabbak vagyunk, minél jobban alkalmazkodunk a tárgy alakjához, nehogy eltaszítsuk – érzékelteti a feladat nehézségét Hao Jiang, a Cutkosky-labor doktorandusz hallgatója. – Amikor viszont már megfogtuk, a további manipuláció során minél merevebbnek kell lennünk, és minél pontosabbnak, hogy a karok és a befogott test mozgása között ne legyen semmiféle késlekedés vagy lötyögés."
A csoport először a laboratórium földi körülményei között tesztelte a fogórobot működését. Gondosan
megmérték, mekkora terhet bír el a szerkezet,
mi történik a különböző nyomó- és csavaróerők hatására, és hányszor képesek a tapadófelszínek megfogni és elengedni tárgyakat. Ezt követően a NASA JPL-lel való együttműködésüknek köszönhetően valódi zéró gravitációs helyzetekben is kipróbálhatták a berendezést.
A JPL-ben van egy szoba, aminek a padlója úgy működik, mint egy hatalmas léghoki-asztal: bármi, amit rátesznek, ellenállás nélkül siklik. Ez egyfajta „2D-zéró gravitációs" helyzetet teremt, mert a mozgó tárgyakra semmilyen számottevő erő nem hat a padló síkjában. Itt – ahogy Hawkes elmesélte – „néztük, ahogy az egyik robot kergeti a másikat, elfogja, majd visszahúzza oda, ahová mi szeretnénk.
Azt hiszem, mindnyájunknak nagyon tanulságos volt látni, ahogy egy viszonylag kicsi tapadófelület elhúz egy 300 kilós robotot."

Jiang és Parness ezután repülőre szállt a robottal, és két nap leforgása alatt összesen 80-szor emelkedtek és süllyedtek parabolikus pályán úgy, hogy 20 másodpercnyi kétszeres gravitációt 20 másodpercnyi zéró gravitáció követett. A fogórobot a szabadeséses periódusokban sikeresen megfogott, majd elengedett egy kockát és egy nagy strandlabdát, méghozzá olyan finoman, hogy a tárgyak elengedéskor alig mozdultak.
Végül Parness megtervezte a robot kicsinyített változatát, amely felmehetett a Nemzetközi Űrállomásra, és ott mutathatta meg képességeit. Az igazi erőpróba azonban az lesz, amikor az űrállomáson kívül helyezik majd üzembe a berendezést.
Ehhez azonban úgy kell módosítani a robotot, hogy tartósabb anyagokból készüljön, és jobban ellenálljon az extrém hőmérsékleti és sugárzási körülményeknek.
A jelenlegi prototípus lézerrel vágott rétegelt lemezből készült, és gumiszalagok is vannak rajta, amelyek az űrben törékennyé válnának.